Konsorcjum ZDG TOR, SkySnap oraz Politechniki Krakowskiej opracowuje kompleksowy system wsparcia zarządzania bezpieczeństwem ruchu drogowego w mieście. Nowe rozwiązanie będzie wykorzystywało sztuczną inteligencję oraz wysokiej jakości kamery rozmieszczone na dronach. Jakość zebranych danych będzie nieporównywalna z technikami stosowanymi dotychczas. Projekt jest współfinansowany ze środków unijnych w ramach konkursu Narodowego Centrum Badań i Rozwoju „Szybka Ścieżka”.
Celem projektu badawczego jest stworzenie proaktywnego systemu wspomagania zarządzania bezpieczeństwem ruchu drogowego. Ma on wychwytywać sytuacje niebezpieczne wśród wszystkich użytkowników ruchu, zanim jeszcze dojdzie do wypadku lub stłuczki. Jego ważną częścią mają być drony, umożliwiające zbieranie z powietrza informacji z dużego obszaru (nawet do kilku kilometrów kwadratowych). Drugi kluczowy element to technologia uczenia maszynowego (deep learning).
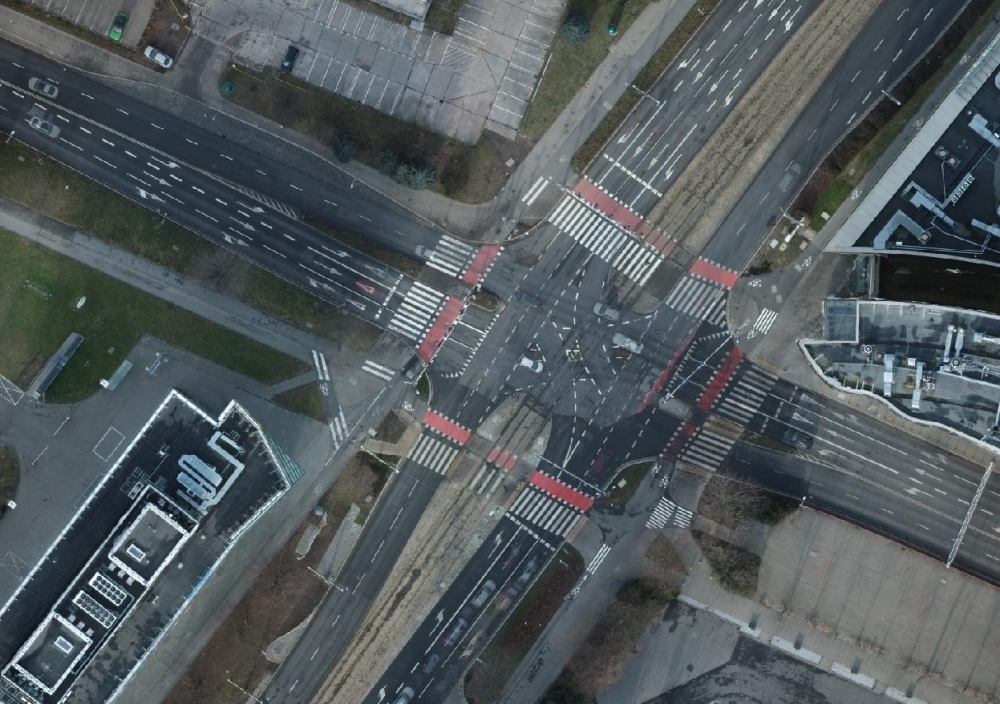
Zarządzanie ruchem oparte na danychPrzed systemem postawiono dwa główne zadania. Pierwszym jest automatyczne wyszukiwanie wszystkich uczestników ruchu (z pieszymi włącznie) na rejestrowanych za pomocą dronów nagraniach wideo. Drugie – to śledzenie trajektorii ruchu pojazdów i pieszych w newralgicznych miejscach oraz badanie zależności przestrzennych między ruchem a infrastrukturą drogową. – Mając trajektorię i lokalizację, przy pomocy uczenia maszynowego „wytrenujemy” system, dzięki któremu będziemy mogli wykrywać sytuacje niebezpieczne. Pozwoli to sprawdzić, jak często i z jakimi uczestnikami w danym miejscu powstają niebezpieczne sytuacje – wyjaśnia Konrad Sosnowicz ze SkySnap.
Na bazie tak zebranego materiału system będzie automatycznie generował raporty. Posłużą one za podstawę do rekomendacji zmian infrastrukturalnych lub korekt organizacji ruchu. Docelowo system ma działać poprzez portal internetowy, tak by klient mógł samodzielnie wykonać nalot dronem, nagrać np. 24-godzinny film i na jego podstawie wygenerować raport.
– Aby sprawdzić działanie proponowanych zmian organizacji ruchu, będziemy korzystali z matematycznych modeli mikro i makro. Programy do ich tworzenia są w Polsce popularne i wiele samorządów już z nich korzysta. Pokażą nam one, czy zmiana rzeczywiście będzie dobrze działała, jak zmieni się ruch na skrzyżowaniu i w okolicy oraz jak wpłynie to na przejezdność – uzupełnia Maciej Mysona z ZDG TOR. Program jest skierowany do zarządców dróg zarówno w mniejszych, jak i w większych miastach, a także planistów miejskich. Ograniczenie liczby wypadków drogowych będzie dużą korzyścią dla lokalnych społeczności. Oprócz samej ochrony ludzkiego życia i zdrowia najważniejszą z nich będzie bardziej efektywne wydawanie pieniędzy na poprawę bezpieczeństwa ruchu drogowego. Inwestycje będą mogły być planowane i realizowane na miarę rzeczywistych, zmierzonych potrzeb, a nie uznaniowo i na wyczucie.
Dokładność do kilku centymetrówJak zastrzega, konsorcjum dostarczy jedynie narzędzie informatyczne, ale nie odpowiada za sposób jego wykorzystywania. – Na końcu o tym, czy na przykład zlikwidować niebezpieczne przejście dla pieszych albo zmienić organizację ruchu podczas imprezy masowej, i tak będzie decydował człowiek. Program nie będzie pokazywał automatycznie, co trzeba zmienić, ale dostarczy olbrzymiej dawki wiedzy – podkreśla Mysona. – Analiza wykonana narzędziem będącym produktem projektu pomoże zdiagnozować obecny stan w podobny sposób, jak badanie lekarskie określa stan zdrowia pacjenta. Pokaże też, czym może grozić brak wprowadzenia zmian – uzupełnia Sosnowicz.
Jakość zebranych danych będzie nieporównywalna z technikami stosowanymi dotychczas. – System da nam możliwość parametryzacji i przewidywania konfliktów. Będzie to zupełnie inna perspektywa, która umożliwi bardziej obiektywne decyzje – przekonuje przedstawiciel SkySnap. To, jak dokładne będą pomiary, zostanie ustalone na etapie dalszych badań. – Z naszych doświadczeń wynika jednak, że margines błędu może wynieść nawet kilka centymetrów. Główny cel to badanie trajektorii ruchu. Zobaczymy, jak dobrze uda nam się opracować do tego celu algorytmy – zapowiada. Co ważne, obrazy z analizowanych sąsiednich obszarów, obsługiwanych przez osobne drony, będzie można łączyć ze sobą.

Przedstawiciel ZDG TOR zwraca uwagę, że wraz z bezpieczeństwem poprawi się także płynność ruchu i przepustowość dróg. – Wychodzimy o krok do przodu w stosunku do zasad projektowania w Polsce. Dziś w wielu przypadkach wytyczne projektowe nie gwarantują wysokiego poziomu bezpieczeństwa. Jeśli wyeliminujemy sytuacje potencjalnie niebezpieczne, nie będzie też potrzeby nagłego hamowania i związanych z nim zatrzymań ruchu, co może przełożyć się na zwiększenie przepustowości – argumentuje Mysona.
Trzy drony zamiast kilkudziesięciu kamer
Wielu klientów ZDG TOR narzekało na brak dostępnego rozwiązania kwestii bezpieczeństwa i modelowania ruchu. – Policzyć pojazdy i zmierzyć ich prędkość można przy pomocy kamer. Nie daje to jednak pełni wiedzy o charakterystyce ruchu drogowego. W porównaniu z nagraniami z drona różnica jest taka, jak między grą komputerową w 2D i 3D – tłumaczy obrazowo Mysona. Pomiary z powietrza są też o wiele wydajniejsze. Dziś, chcąc mierzyć parametry na rondzie wielowlotowym, trzeba rozmieścić kilkadziesiąt kamer. Do zebrania tej samej ilości materiału wystarczą 1-3 drony.
Żaden program nie działa jednak bezbłędnie. W jaki sposób będzie weryfikowana praca sztucznej inteligencji? – Zastosujemy metryki specjalnie wybrane i opracowane do tego typu zagadnienia uczenia maszynowego. Do sprawdzania poprawności będzie służył zbiór testowy, przygotowany ręcznie przez człowieka. Po przygotowaniu modelu jego wyniki będą porównywane z docelowym – i na podstawie rozbieżności ocenimy, czy model działa dobrze, czy nie. Dążymy do 90-95-proc. poprawności – wyjaśnia Sosnowicz.
Pomysł wykorzystania dronów do tego rodzaju prac jest nowatorski w skali światowej. – W Polsce na pewno nie ma takiego rozwiązania – zapewnia Mysona. W innych krajach świata funkcjonują częściowo podobne systemy, ale bez elementu proaktywności. – Poszczególne elementy są już dostępne, ale takiej całości jak my nikt jeszcze nie stworzył – dodaje przedstawiciel SkySnap.
Najpierw badania, potem rozwójPrace nad rozwiązaniem podzielono na dziewięć etapów. Na razie trwa pierwszy z nich – tworzenie metodyki zbierania danych. – Aby system działał odpowiednio, musimy dobrać parametry, takie jak rozdzielczość nagrań, wysokość lotu, rodzaj wykorzystywanego sprzętu czy czas latania – wylicza Sosnowicz. Do każdego miejsca wykonywania pomiarów trzeba też dobrać odpowiedni profil. W drugim stadium naukowcy z Politechniki Krakowskiej będą tworzyć metodykę prowadzenia analiz BRD. – Zbadamy zagrożenia w poszczególnych grupach uczestników ruchu z uwzględnieniem elementów infrastruktury i ich lokalizacji. Na tej podstawie będziemy identyfikować konflikty – zapowiada Marcin Wojtowicz z ZDG TOR. Naukowcy określą parametry brzegowe sytuacji potencjalnie niebezpiecznych: prędkość, przyspieszenie, kierunek, odległość od innych pojazdów i czas reakcji kierowcy.
Trzecim etapem będą przygotowania na poziomie programów mikro- i makrosymulacyjnych. Zadanie to powierzono ZDG TOR. – Będziemy sprawdzali, jak nasze rozwiązania działają na modelach – mówi Mysona. Dane będą tu wprowadzane jeszcze manualnie. Następne etapy pozwolą już na automatyzację tego procesu. Następnie specjaliści SkySnap będą tworzyli zbiory uczące z wykorzystaniem wiedzy zdobytej w poprzednich etapach. W efekcie modele zaczną automatycznie wykrywać na filmach i zdjęciach uczestników ruchu drogowego, trajektorię ich ruchu, a także sytuacje, które w zebranych wcześniej materiałach zostaną wskazane jako niebezpieczne.
W myśl zasad konkursu NCBiR, w którym startowało konsorcjum, większość badań ma zostać przeprowadzona poza województwem mazowieckim. Listy intencyjne w sprawie testowania systemu podpisano z władzami takich miast, jak Kołobrzeg, Jelenia Góra, Ełk i Włocławek. – Docelowy klient to nie tylko samorządy, lecz także pozostali zarządcy dróg i obiektów. Przedmiotem analizy może być na przykład teren wokół centrum handlowego – mówi Sosnowicz.

 Komercjalizacja? Nie wcześniej niż w 2024 r.
Komercjalizacja? Nie wcześniej niż w 2024 r.– Dalsza przyszłość to automatyczna kalibracja modeli ruchu oraz weryfikacja warunków brzegowych. Pierwsze cztery etapy będą przeznaczone na prace badawcze, a kolejne – od lutego 2023 r. – na prace rozwojowe. Ostatni etap to już prace przedwdrożeniowe, czyli przygotowanie do komercjalizacji przyszłej usługi – podsumowuje Wojtowicz.
Kiedy można spodziewać się ostatecznej, gotowej do sprzedaży wersji systemu? – Wspomniany ostatni etap potrwa 2 miesiące i zakończy się w grudniu 2023 r. Jego efektem ma być doprowadzenie rozwiązania będącego przedmiotem projektu do stanu, kiedy będzie można zaprezentować je na rynku. W tym celu na końcowym etapie planujemy opracowanie dokumentacji wdrożeniowej, przeprowadzenie testów wydajnościowych oraz bezpieczeństwa, przygotowanie do uzyskania certyfikatów ISO, badania rynku oraz – w ostatnim kroku – przeprowadzenie pilotażu. Zakładamy, że po zakończeniu opisanych prac będzie już gotowa wersja komercyjna. Pamiętajmy jednak, że to projekt badawczo-rozwojowy, a rezultat nie jest pewny – zastrzega Wojtowicz. Trudno więc ze stuprocentową pewnością wskazać dokładny termin komercjalizacji. – Wierzymy jednak, że uda się osiągnąć zamierzone cele zgodnie z przyjętym harmonogramem – dodaje.
Umowę z NCBiR podpisano 25 stycznia bieżącego roku. Wielkość kosztów kwalifikowalnych w projekcie oszacowano na 6 758 085,92 zł. Założona wartość dofinansowania dla wszystkich konsorcjantów to łącznie 5 387 130,98 zł.











 Zapisz się do newslettera:
Zapisz się do newslettera:















